Safety over EtherCAT
The protocol Safety over EtherCAT (FSoE=FailSafe over EtherCAT) is a safety certified technology developed according to IEC 61508 and standardized internationally in IEC 61784-3. For more details refer to ethercat.org.
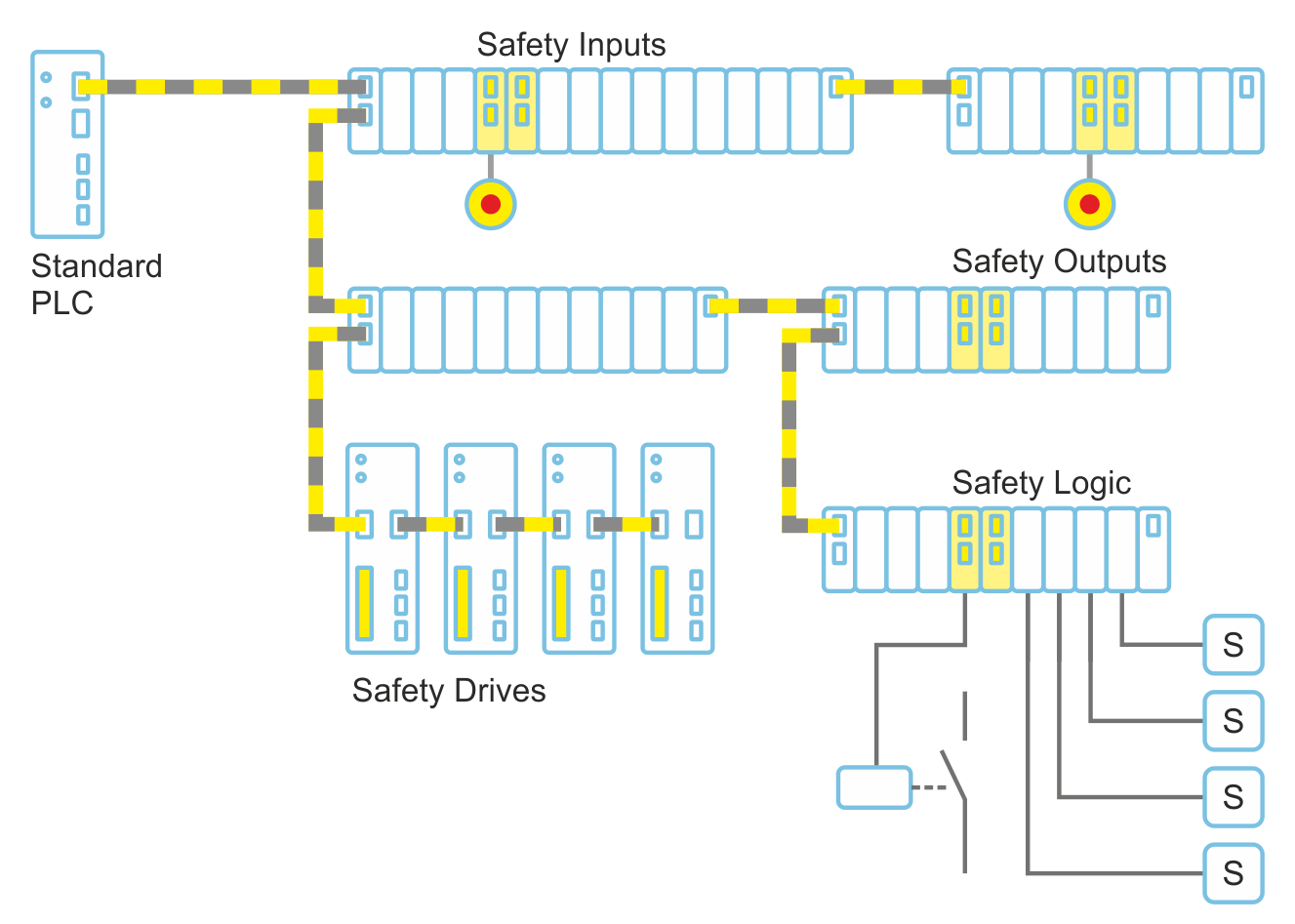
FSoE is implemented by using Safety-certified devices connected to each other with the same EtherCAT cable (no additional cables are required), so that Safety-data is transferred in parallel with transferring standard data on the same network. FSoE system uses so called Black Channel approach. Decentralized Safety-Logic is used to implement safety.
FSoE requires the Explicit Device Identification mechanism to be used to identify FSoE device on the bus.
Certification of Safety is done on Safety devices level and not on EtherCAT Master layer. Safety-certified configuration tools are used to program and flash a safety logic into Safety devices.
Ethercat Master has to be configured to set communication between Safety devices using Slave-to-Slave communication. Cyclically EtherCAT Master prepares frame for Safety devices. In case of communication error or if a failure is detected, Safety Master reacts to them according to its configured safety logic. For example, if a man is detected near machine, then Safety Master reduces drives’ speed, or if detected that a cover in the system is opened, Safety Master stops the production.
KPA EtherCAT Master supports the protocol Safety over EtherCAT. Slave-to-Slave communication can be configured in KPA EtherCAT Studio and then loaded to the Master.